#include <SPI.h>
#include <RF24.h>
RF24 radio(9, 10); // (CE, CSN)
char text[0]="";
const byte address[6] = "1RF24";
void setup() {
radio.begin();
radio.setPALevel(RF24_PA_MAX);
radio.setChannel(125);
radio.openWritingPipe(address);
radio.stopListening();
// Serial.begin(9600);
}
void loop() {
// Serial.println(radio.isChipConnected());
if (analogRead(1)>700){
char text[]="w";
radio.write(&text, sizeof(text));
}
if (analogRead(1)<100){
char text[]="s";
radio.write(&text, sizeof(text));
}
else{
if(analogRead(0)>700){
char text[]="d";
radio.write(&text, sizeof(text));
}
if (analogRead(0)<100){
char text[]="a";
radio.write(&text, sizeof(text));
}
delay(10);
}
}
#include <SPI.h>
#include <RF24.h>
RF24 radio(7, 8); // (CE, CSN)
const byte address[6] = "1RF24";
void setup() {
// Serial.begin(115200);
radio.begin();
radio.setPALevel(RF24_PA_MAX);
radio.setChannel(125);
radio.openReadingPipe(0,address);
radio.startListening();
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
}
void loop() {
if(radio.available()){
char text[2] = {0};
radio.read(&text, sizeof(text)-1);
String code = String(text); // Array -> Zeichen ("code")
if (code == "w") {
digitalWrite(3,0);
digitalWrite(2,1);
digitalWrite(4,0);
digitalWrite(5,1);
}
if (code == "s"){
digitalWrite(2,0);
digitalWrite(3,1);
digitalWrite(5,0);
digitalWrite(4,1);
}
// Serial.println(code);
if (code=="d"){
digitalWrite(2,0);
digitalWrite(3,1);
digitalWrite(4,0);
digitalWrite(5,1);
}
if (code=="a"){
digitalWrite(2,1);
digitalWrite(3,0);
digitalWrite(4,1);
digitalWrite(5,0);
}
}
else {
delay(30);
if (!radio.available()){
digitalWrite(2,0);
digitalWrite(3,0);
digitalWrite(4,0);
digitalWrite(5,0);
}}
delay(10);
}

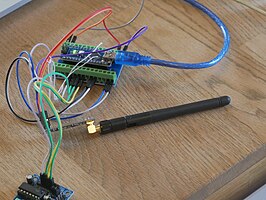 Funkmodul
Funkmodul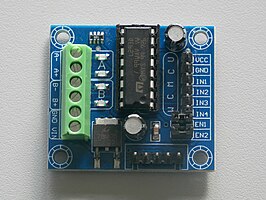 Motortreiber
Motortreiber
