Projekt:FE Beobachtung 1/Meteosat/Theoretische Grundlagen
| Teilprojekt Meteosat | Weitere Teilprojekte |
Umlaufbahnen und Navigation
BearbeitenUm Meteosat-Daten vollständig verstehen und nutzen zu können, ist es notwendig die Umlaufbahn zu kennen, auf der sich ein Meteosat-Satellit bewegt, und auch die Geometrie, mit der er die Erde beobachtet. Dieser Abschnitt beginnt mit einem Überblick über die grundlegenden physikalischen Prinzipien, anhand derer man Umlaufbahnen nachvollziehen und Satelliten im Raum ausrichten kann. Dieses Wissen ermöglicht es, die Position eines orbitalen Flugkörpers zu jeder Zeit zu berechnen. Störungen der Bahn und deren Effekte werden anschließend diskutiert.
Newton's Gesetze
BearbeitenIsaac Newton entdeckte die ![]() grundlegenden Prinzipien, welche die Bewegungen von Satelliten und anderen Himmelskörpern beherrschen.
grundlegenden Prinzipien, welche die Bewegungen von Satelliten und anderen Himmelskörpern beherrschen.
- Jeder Körper wird seinen Ruhezustand oder seine gleichförmige Bewegung auf einer geraden Linie fortsetzen, solange nicht eine Krafteinwirkung diesen Zustand ändert.
- Die Änderung des Impulses ist proportional der einwirkenden Kraft und findet in Richtung der einwirkenden Kraft statt.
- Aktion und Reaktion sind gleich und entgegen gesetzt.
Da der Impuls definiert ist als das Produkt aus Masse und Geschwindigkeit, ergibt sich folgende Formel für Newton's zweites Gesetz (speziell mit der Satellitenmasse mS):

wobei für Kraft, für Masse, für Beschleunigung, für Geschwindigkeit und für Zeit stehen. Weiterhin formulierte Newton den funktionalen Zusammenhang der Kraft, mit welcher man die Satelliten-Bewegung bezeichnen kann:
Newton's allgemeines ![]() Gesetz der Gravitation
Gesetz der Gravitation






Die Anziehungskraft zwischen zwei Punktmassen und getrennt durch eine Entfernung (speziell mit der Erdmasse mE) ist




wobei die ![]() Gravitationskonstante ist.
Gravitationskonstante ist.

In der (kreisförmigen) Umlaufbahn des Satelliten müssen beide Kräfte gleich groß sein:

Durch Weglassen von F und Kürzen von mS folgt:

Die Umlaufbahn eines Satelliten ist also unabhängig von seiner Masse. Die Ableitung der Geschwindigkeit nach der Zeit (Beschleunigung) ist hier nur durch die Richtungsänderung gegeben, denn die Bahngeschwindigkeit (also die Geschwindigkeit in tangentialer Richtung) ist konstant. Die Kraft, die mit der Richtungsänderung verbunden ist, wird auch als Zentrifugalkraft bezeichnet.
Die Periodendauer des Satelliten ist definiert als:

Der Radius, welcher benötigt wird für einen geosynchronen Orbit, in dem sich auch die Meteosat-Satelliten befinden, berechnet man mit folgender Gleichung:

mit als gleicher ![]() Winkelgeschwindigkeit von Erde und Satellitenbahn und als
Winkelgeschwindigkeit von Erde und Satellitenbahn und als ![]() Erdmasse.
Damit ergibt sich ein benötigter Radius von 42.164 km, oder eine Höhe von 35.786 km über der Erdoberfläche (vereinfachende Annahme: kugelförmiger Orbit). [1]
Erdmasse.
Damit ergibt sich ein benötigter Radius von 42.164 km, oder eine Höhe von 35.786 km über der Erdoberfläche (vereinfachende Annahme: kugelförmiger Orbit). [1]


Kepler'sche Umlaufbahnen
BearbeitenSatelliten reisen jedoch nicht auf exakten Kreisbahnen, obwohl dies für Satelliten angestrebt wird. Die Herleitung der äußeren Form von Satelliten-Bahnen erfolgt aus den eben genannten Newton'schen Gesetzen, und wird durch die Kepler-Gesetze und die Kepler-Gleichung zusammengefasst.
Keplers Gesetze
- Alle Planeten reisen auf elliptischen Bahnen mit der Sonne als Mittelpunkt
- Der Radius-Vektor von der Sonne zu einem Planeten streicht über die selbe Fläche in der selben Zeit
- Das Verhältnis vom Quadrat der Rotationsperiode eines Planeten zur dritten Potenz der großen Halbachse ist gleich für alle Planeten, die sich um die Sonne drehen.
Die selben Gesetze gelten, wenn man Planet durch Satellit und Sonne durch Erde ersetzt. Die o.g. Gleichung zur Berechnung des geosynchronen Radius ist Ausdruck des dritten Kepler'schen Gesetzes für den Kreis als Spezialfall.
Elliptische Geometrie
Bearbeiten
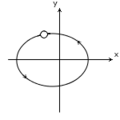
Die Parameter, welche genutzt werden, um Satelliten-Bahnen zu beschreiben basieren teilweise auf Terminologie aus der Geometrie. Der Punkt, an dem der Satellit der Erde am nächsten ist, wird als Perigäum bezeichnet. Der Punkt, an dem er am weitesten von der Erde entfernt ist, nennt man Apogäum. Der Strecke zwischen jeweils einem der Punkte und dem Mittelpunkt der Ellipse bezeichnet man als große Halbachse a. Die Entfernung vom Mittelpunkt der Ellipse zum Mittelpunkt der Erde (dem Brennpunkt) geteilt durch a bezeichnet man als Exzentrizität oder Außermittigkeit . Die Ellipsengleichung als Pfad, dem der Satellit folgt, ist in Polarkoordinaten gegeben und hat folgendes Aussehen:


ist dabei ein Winkelverhältnis, welches vom Perigäum abhängig ist.

Kepler's Gleichung
BearbeitenEin Satellit in einer kreisförmigen Umlaufbahn bewegt sich mit gleichförmiger Winkelgeschwindigkeit. Durch das zweite Kepler'sche Gesetz kann ein Himmelskörper auf einer elliptischen Umlaufbahn keine gleichförmige Umlaufbahn haben; er muss schneller reisen, wenn er der Erde näher kommt. Die Position des Körpers als eine Funktion der Zeit kann durch Anwendung der ![]() Kepler'schen Gleichung bestimmt werden:
Kepler'schen Gleichung bestimmt werden:

wobei die ![]() mittlere Anomalie darstellt; nimmt linear mit der Zeit zu, wobei den entsprechenden Anstieg darstellt, auch mittlere Bewegungskonstante genannt, gegeben durch
mittlere Anomalie darstellt; nimmt linear mit der Zeit zu, wobei den entsprechenden Anstieg darstellt, auch mittlere Bewegungskonstante genannt, gegeben durch


.

Per Definition ist null, wenn der Satellit sich im Perigäum befindet; daher ist die Zeit des Perigäum-Durchlaufs. Der Winkel wird ![]() exzentrische Anomalie genannt.
exzentrische Anomalie genannt.


Ausrichtung im Raum
BearbeitenDurch Berechnung von und zur Zeit kann die Position des Satelliten in der Ebene seiner Umlaufbahn bestimmt werden. Nun muss die Ausrichtung dieser Ebene im Raum bekannt sein. Um diese zu bestimmen, muss zuerst ein ![]() Inertial-Koordinatensystem definiert werden, d. h. ein nichtbeschleunigtes Koordinaten-System, in dem Newton's Bewegungsgesetze gültig sind. Hier kommt ein
Inertial-Koordinatensystem definiert werden, d. h. ein nichtbeschleunigtes Koordinaten-System, in dem Newton's Bewegungsgesetze gültig sind. Hier kommt ein ![]() astronomisches Koordinaten-System zur Anwendung, das sog. Rektaszension-Deklination Koordinaten-System.
Die genutzten Koordinaten sind:
astronomisches Koordinaten-System zur Anwendung, das sog. Rektaszension-Deklination Koordinaten-System.
Die genutzten Koordinaten sind: ![]() Rektaszension ( ),
Rektaszension ( ), ![]() Deklination ( ), und Radius ( ).
Deklination ( ), und Radius ( ).


Orbitale Elemente
BearbeitenAlle bisher genannten Parameter für die Lokalisierung von Satelliten im Weltraum werden zusammengefasst als klassische orbitale Elemente.
Umlaufbahnen, in denen diese klassischen orbitalen Elemente (außer ) konstant sind, werden ![]() Kepler'sche Umlaufbahnen genannt.
Kepler'sche Umlaufbahnen genannt.
Umlaufbahn von Meteosat
BearbeitenNahezu alle Satelliten befinden sich auf einer von zwei Umlaufbahnen, entweder auf der sonnensynchronen, welche hier nicht weiter erläutert wird, oder auf der geostationären. Auf letzterer befinden sich die Meteosat-Satelliten, weshalb diese kurz näher erläutert wird.
Wie oben erwähnt beträgt der Radius der geosynchronen Umlaufbahn 42.164 km. Störungen dieser Bahn, welche auf die nicht-sphärische Form der Erde zurückzuführen sind, bedürfen einer kleinen Korrektur. Diese Korrekturen betreffen den Neigungswinkel und die Exzentrizität und werden periodisch etwa einmal in der Woche durch entsprechende Manöver (Einschalten der Raketenmotoren) erreicht.
Die Ausdrücke geostationär und geosynchron werden häufig miteinander vertauscht, sind jedoch nicht gleich. Geosynchron bedeutet, dass der Satellit sich mit der selben Winkelgeschwindigkeit wie die Erde dreht. Geostationäre Umlaufbahnen sind geosynchron, haben jedoch keinen Neigungswinkel und keine Exzentrizität. Geostationäre Satelliten erscheinen daher tatsächlich bewegungslos über einem Punkt auf dem Äquator. Die Korrekturmanöver bewahren somit den geostationären Zustand des Satelliten.
Positionierung
BearbeitenDie Ausrichtung des Satelliten im Raum wurde oben bereits besprochen. Dazu sind zunächst die orbitalen Elemente , und nötig, ergänzt durch drei konstante Elemente , und . Diese Werte können Merkblättern zu Satelliten verschiedenster Raumfahrtbehörden entnommen werden. Ist die Ausrichtung des Satelliten bekannt, kann der Satellit mit Hilfe von zwei Methoden einer bestimmten Position zugewiesen werden.


Die Vektor-Rotations-Methode
BearbeitenZunächst muss der Satellit in der Ebene des Orbits lokalisiert werden, das heißt die wahre Anomalie und der Radius müssen über die Gleichungen der elliptischen Geometrie ermittelt werden. Als nächstes wird ein Vektor definiert, der vom Mittelpunkt der Erde zum Satelliten im Rektaszension-Deklination Koordinaten-System zeigt. Die Vektorkoordinaten sind wie folgt:

-
 a) Orbitale Ellipse in x-y-Ebene
a) Orbitale Ellipse in x-y-Ebene -
 b) Rotation um die z-Achse über ω
b) Rotation um die z-Achse über ω -
 c) Rotation um die x-Achse über i
c) Rotation um die x-Achse über i -
 d) Rotation um die z-Achse über Ω (ascending node)
d) Rotation um die z-Achse über Ω (ascending node)




Bild a) zeigt die Annahme, dass sich die orbitale Ellipse in der x-y-Ebene befindet, mit dem Perigäum auf der positiven x-Achse. Um die orbitale Ebene im Raum auszurichten, folgt eine Rotation des oben definierten Vektors. Im ersten Schritt wird eine Rotation um die z-Achse über das Argument des Perigäums ω vorgenommen (Bild b)). Der zweite Schritt beinhaltet die Rotation des Vektors um die x-Achse über die Inklination i (Bild c)). Im letzten Schritt muss der Vektor nun wiederum um die z-Achse über die Rektaszension des Aufsteigenden Knotens Ω rotiert werden (Bild d)).
Der resultierende Vektor (x’’’, y’’’, z’’’) definiert sich somit als Punkt im Rektaszension-Deklination Koordinaten-System zum Zeitpunkt t. Mit den folgenden Gleichungen kann aus dem Vektor der Radius, die Neigung und die Rektaszension des Satelliten berechnet werden:



Ein weiterer Teil der Positionierung eines geostationären Satelliten bezieht sich auf die Berechnung der geographischen Breite und Länge des Subsatellitenpunktes (SSP). Unter der Annahme die Erde sei eine Sphäre, entspricht die geographische Breite der Neigung . Die geographische Länge hingegen errechnet sich aus der Differenz der Rektaszension des Satelliten und der des Nullmeridians.

Die Sphärische-Geometrie-Methode
BearbeitenDiese Methode zur Bestimmung der Position eines geostationären Satelliten beruht sowohl auf der sphärischen Geometrie , als auch der Vektor-Rotations-Methode. Grundlage dieser Methode bildet das Argument der geographischen Breite , definiert als Winkel zwischen Aufsteigendem Knoten und Satellit.


Unter Verwendung der Vektor-Rotations-Methode ergibt sich:

mit r als Entfernung zum Satelliten aus obiger Gleichung,


mit als geographische Breite, als geographische Länge, als Rektaszension des Nullmeridians und als Rotationsrate der Erde relativ zur Bahnebene.
[1]




Verfolgung des Satelliten von der Erde
BearbeitenUm einen Satelliten zu verfolgen wird eine Antenne benötigt, die auf den Satelliten zeigt. Aus den Koordinaten dieser Antenne zusammen mit bereits vorhandenen Informationen aus der Position des Satelliten (siehe Ephemeriden) können so der Erhöhungswinkel ("elevation angle") und der Azimutwinkel bestimmt werden. Die Abbildung zeigt die Geometrie der Satellitenverfolgung mit dem Satellitenvektor s und dem Antennenvektor und dem Differenzenvektor , der von der Antenne zum Satelliten zeigt. Der Erhöhungswinkel des Satelliten ergibt sich somit aus




Für den Azimutwinkel müssen zunächst zwei weitere Vektoren in der Tangentialebene der Antenne definiert werden. Der erste zeigt nordwärts, während sich der zweite Vektor aus der horizontalen Abbildung des Differenzenvektors ergibt. Somit bildet folgende Gleichung den Azimutwinkel des Satelliten:



Bemerkungen: Diese Gleichungen basieren auf der Annahme einer Kugelgestalt der Erde, wobei jedoch die meisten Antennen unempfindlich gegenüber den dadurch verursachten Fehlern sind.
Des Weiteren: Befindet sich der Satellit westlich der Antenne ergibt sich bei der Berechnung des inversen Kosinus ein Azimutwinkel über 180°.
Navigation
Bearbeiten
Neben der Positionierung und der Verfolgung des Satelliten sind auch Informationen über die Koordinaten des beobachteten Erdausschnittes von Bedeutung. Zur Bestimmung dieser Koordinaten muss zunächst detailliertes Wissen über die Position, die Ausrichtung und die Beobachtungsgeometrie des Satelliten vorhanden sein. Vereinfacht wird der Strahl in der Ausrichtung des Radiometers zur Erde betrachtet, der die Quelle der zu messenden Strahlung beinhaltet. Die Stelle an der dieser Strahl die Sphäre der Erde trifft kann durch Lösung der folgenden Gleichung ermittelt werden:

mit der Position des Satelliten , der Entfernung vom Satelliten zur Erde s und dem Vektor der Ausrichtung des Teleskops . Nach Auflösung der Gleichung nach s und unter Verwendung der Positionsgleichungen können so Breiten- und Längengrade für den beobachteten Erdausschnitt bestimmt werden. Für das scannende Radiometer in Meteosat ist es notwendig für jedes einzeln gescannte Pixel diese Koordinaten zu bestimmen, da diese jeweils unterschiedliche Zeiten und Positionen aufweisen.


Raum-Zeit-Sampling
BearbeitenDas Raum-Zeit-Sampling als Teilgebiet der Satellitenfernerkundung beschäftigt sich mit der Wahl eines Orbits bzw. eines Scannprofils. Diese Wahl hängt von verschiedenen Schlüsselfragen ab:
- Welcher Bereich soll um welche Uhrzeit beobachtet werden?
- Wie oft sollen diese Messungen stattfinden?
- Mit welchen Beobachtungs- und Azimutwinkeln sollen die Messungen durchgeführt werden?
Bei geostationären Satelliten wie Meteosat ist das Raum-Zeit-Sampling deutlich unkomplizierter als bei polarumlaufenden: Diese Satelliten bleiben die gesamte Zeit über an einem definierten Punkt über dem Äquator. Somit unterscheidet sich das betrachtete Gebiet, normalerweise circa 42 Prozent der Erdoberfläche, über den Beobachtungszeitraum nicht. Die Häufigkeit, mit der die Abtastung stattfindet, hängt nur von der maximalen Frequenz ab, mit der das Scannsystem messen kann. Gleichermaßen ändert sich der Beobachtungs- und Azimutwinkel nicht, es wird zu jeglichem Zeitpunkt nur mit fixen Winkeln gemessen.
Grundlagen Strahlung in Bezug auf Meteosat
BearbeitenIn diesem Kapitel soll kurz auf die für Meteosat wichtigen Prinzipien von Strahlung und deren Transfer in der Atmosphäre eingegangen werden. Der Großteil dieser Grundlagen findet sich detailliert auf verschiedenen Wikiversity- und Wikipedia-Seiten und soll in diesen Text nur teilweise über Verlinkungen miteinbezogen werden. Die für Meteosat wichtigen Punkte Helligkeitstemperatur, Filterfunktionen und Gewichtsfunktionen sollen genauer erläutert werden.
Das Radiometer SEVIRI als passives Fernerkundungssystem sendet im Gegensatz zu aktiven Fernerkundungssystemen keine elektromagnetische Strahlung aus. Es empfängt die von der Erde reflektierten Sonnenstrahlen als spektrale Strahldichten. Diese Strahldichten werden im Radiometer als elektrische Impulse gespeichert, um später über verschiedene Verfahren ausgewertet zu werden (siehe Projekt Fernerkundung 2007).
Helligkeitstemperatur
BearbeitenDie Helligkeitstemperatur spielt eine große Rolle in der Verarbeitung von Satellitendaten im Infrarotbereich. Zur Auswertung und zum Vergleich der Messungen in unterschiedlichen Kanälen bietet sich die Umrechnung der Strahldichten in Helligkeitstemperaturen an. Die Helligkeitstemperatur eines grauen Körpers ist genau die Temperatur, die ein schwarzer Körper haben muss, damit von ihm die gleiche Strahldichte ausgesandt wird wie vom grauen Körper. Somit gilt:

ist hierbei die Helligkeitstemperatur des Körpers, die Emissivität und die eigentliche Temperatur. Die Helligkeitstemperatur eines Körpers in einem Kanal wird folgendermaßen berechnet:





Wobei die Energie ist, die pro m² und s im Wellenlängenbereich μm in den Raumwinkel gestrahlt wird, ist die erste Strahlungskonstante von und ist die zweite Strahlungskonstante von . Der atmosphärische Einfluss wird in dieser Approximation vernachlässigt und die Oberfläche als Lambertsche Fläche angenommen.[2]





Filterfunktionen
BearbeitenRadiometer messen Strahlung nicht über die gesamte Breite oder über genau eine bestimmte Wellenlänge, sondern über ein bestimmtes Strahlungsspektrum. Dabei reagiert jedes Radiometer nach einer speziellen spektralen Funktion auf die empfangene elektromagnetische Strahlung in einem Kanal. Diese Funktion ist eine Art Wichtungsfunktion mit dem Maximum 1,0. Sie bestimmt die Intensität der einzelnen Wellenlängen im gesamten Signal eines Kanals in kleinen diskreten Schritten. [3]
Nachfolgende Abbildung zeigt beispielhaft ein Schema der Filterfunktionen der Kanäle 5, 10 und 11 des SEVIRI-Radiometers von MSG-1.

Gewichtsfunktionen
BearbeitenDie Gewichtsfunktionen („Weighting functions“) von Radiometern beschreiben die Wichtung der Signale der einzelnen Kanäle in Abhängigkeit von der Höhe bzw. des Drucks in der Atmosphäre. Gewichtsfunktionen, auch Quellfunktionen genannt, werden insbesondere zur Ableitung von atmosphärischen Temperaturprofilen benötigt.

Die vorangestellte Grafik zeigt drei idealisierte Szenarien von Kanal-Gewichtsfunktionen nach Petty [2]:
a) Im ersten Fall sind die Gewichtsfunktionen als scharfe Linien dargestellt. Pro Höhe empfängt ein Kanal i nur die Emission in einer speziellen Wellenlänge und in keiner anderen. Hier stimmen die beobachteten Helligkeitstemperaturen genau mit der realen Temperatur in der betrachteten Höhe überein.
b) Der zweite Fall als ein deutlich realistischeres Szenario beschreibt die Gewichtsfunktion als eine Funktion mit einer bestimmten vertikalen Ausbreitung. Hier entsprechen die beobachteten Temperaturen einem gemittelten Wert von Bλ [T(z)]. Nun ist es zwar schwieriger, die eigentliche Schichttemperatur in einem bestimmten Kanal herauszufinden, dennoch gibt es keine Überlagerung zwischen den einzelnen Funktionen.
c) Der dritte und letzte Fall entspricht noch am ehesten der Realität: Die Gewichtsfunktionen der einzelnen Kanäle sind recht weit über die Höhe an der y-Achse ausgedehnt und überlagern sich deutlich.
Zusammenfassend gilt folgendes: Es ist zwar offensichtlich, dass sich in den gemessenen Strahlungsintensitäten auch Aussagen über das vertikale Temperaturprofil finden lassen. Dennoch ist es überaus schwierig, qualitativ hochwertige Informationen darüber nur aus diesen Gewichtsfunktionen abzuleiten. Mehr Informationen zu Gewichtsfunktionen sind im Teilkapitel TOVS zu finden.
Quellenangabe
Bearbeiten- ↑ a b c d e f g h i Kidder S. Q., I. Vonder Haar, 1995: Satellite meteorology: an introduction, Academic Press, San Diego.
- ↑ a b Petty, G.-W.,2006: A first course in atmospheric radiation. Second Edition, Sundog Publishing, Madison, Wisconsin, 458 pp.
- ↑ Liou, K.-N.,2002: Introduction to Atmospheric Radiation. Second Edition, Academic Press, San Diego, 583 pp.